


Soft robots — which don’t just have soft exteriors but are also powered by fluid flowing through flexible channels — have become a sufficiently popular research topic that they now have their own journal, Soft Robotics. In the first issue of that journal, out this month, MIT researchers report the first self-contained autonomous soft robot capable of rapid body motion: a “fish” that can execute an escape maneuver, convulsing its body to change direction in just a fraction of a second, or almost as quickly as a real fish can.
“We’re excited about soft robots for a variety of reasons,” says Daniela Rus, a professor of computer science and engineering, director of MIT’s Computer Science and Artificial Intelligence Laboratory, and one of the researchers who designed and built the fish. “As robots penetrate the physical world and start interacting with people more and more, it’s much easier to make robots safe if their bodies are so wonderfully soft that there’s no danger if they whack you.”
Another reason to study soft robots, Rus says, is that “with soft machines, the whole robotic planning problem changes.” In most robotic motion-planning systems, avoiding collisions with the environment is the highest priority. That frequently leads to inefficient motion, because the robot has to settle for collision-free trajectories that it can find quickly.
With soft robots, collision poses little danger to either the robot or the environment. “In some cases, it is actually advantageous for these robots to bump into the environment, because they can use these points of contact as means of getting to the destination faster,” Rus says.
But the new robotic fish was designed to explore yet a third advantage of soft robots: “The fact that the body deforms continuously gives these machines an infinite range of configurations, and this is not achievable with machines that are hinged,” Rus says. The continuous curvature of the fish’s body when it flexes is what allows it to change direction so quickly. “A rigid-body robot could not do continuous bending,” she says.
Escape velocity
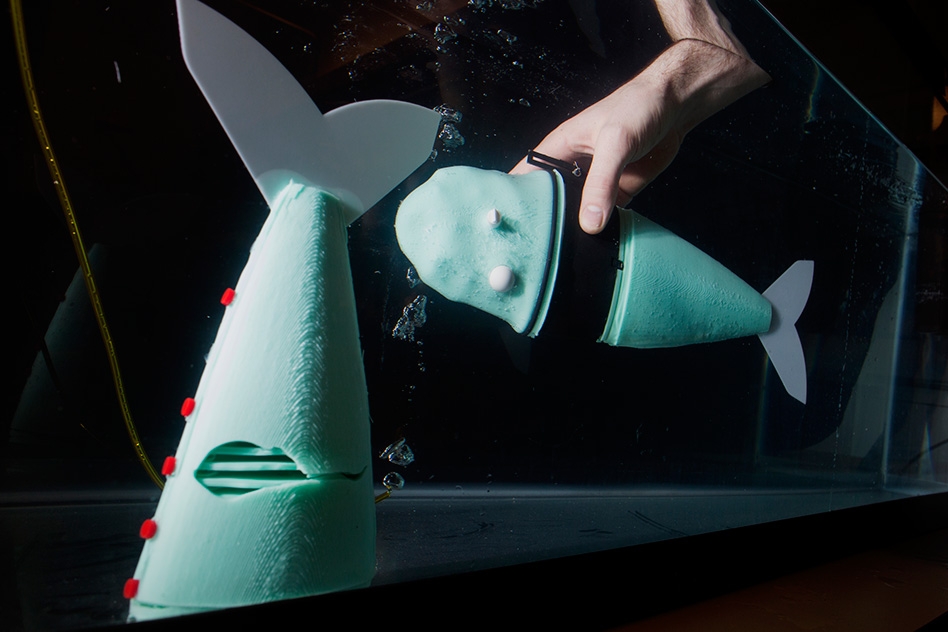
The robotic fish was built by Andrew Marchese, a graduate student in MIT’s Department of Electrical Engineering and Computer Science and lead author on the new paper, where he’s joined by Rus and postdoc Cagdas D. Onal. Each side of the fish’s tail is bored through with a long, tightly undulating channel. Carbon dioxide released from a canister in the fish’s abdomen causes the channel to inflate, bending the tail in the opposite direction.
Each half of the fish tail has just two control parameters: the diameter of the nozzle that releases gas into the channel and the amount of time it’s left open. In experiments, Marchese found that the angle at which the fish changes direction — which can be as extreme as 100 degrees — is almost entirely determined by the duration of inflation, while its speed is almost entirely determined by the nozzle diameter. That “decoupling” of the two parameters, he says, is something that biologists had observed in real fish.
“To be honest, that’s not something I designed for,” Marchese says. “I designed for it to look like a fish, but we got the same inherent parameter decoupling that real fish have.”
That points to yet another possible application of soft robotics, Rus says, in biomechanics. “If you build an artificial creature with a particular bio-inspired behavior, perhaps the solution for the engineered behavior could serve as a hypothesis for understanding whether nature might do it in the same way,” she says.
Marchese built the fish in Rus’ lab, where other researchers are working on printable robotics. He used the lab’s 3-D printer to build the mold in which he cast the fish’s tail and head from silicone rubber and the polymer ring that protects the electronics in the fish’s guts.
The long haul
The fish can perform 20 or 30 escape maneuvers, depending on their velocity and angle, before it exhausts its carbon dioxide canister. But the comparatively simple maneuver of swimming back and forth across a tank drains the canister quickly. “The fish was designed to explore performance capabilities, not long-term operation,” Marchese says. “Next steps for future research are taking that system and building something that’s compromised on performance a little bit but increases longevity.”
A new version of the fish that should be able to swim continuously for around 30 minutes will use pumped water instead of carbon dioxide to inflate the channels, but otherwise, it will use the same body design, Marchese says. Rus envisions that such a robot could infiltrate schools of real fish to gather detailed information about their behavior in the natural habitat.
“All of our algorithms and control theory are pretty much designed with the idea that we’ve got rigid systems with defined joints,” says Barry Trimmer, a biology professor at Tufts University who specializes in biomimetic soft robots. “That works really, really well as long as the world is pretty predictable. If you’re in a world that is not — which, to be honest, is everywhere outside a factory situation — then you start to lose some of your advantage.”
The premise of soft robotics, Trimmer says, is that “if we learn how to incorporate all these other sorts of materials whose response you can’t predict exactly, if we can learn to engineer that to deal with the uncertainty and still be able to control the machines, then we’re going to have much better machines.”
The MIT researchers’ robot fish “is a great demonstration of that principle,” Trimmer says. “It’s an early stage of saying, ‘We know the actuator isn’t giving us all the control we’d like, but can we actually still exploit it to get the performance we want?’ And they’re able to show that yes, they can.”






